- Über uns
- Forschungskompetenzen
- DIGITAL – Institut für Digitale Technologien
- MATERIALS – Institut für Sensorik, Photonik und Fertigungstechnologien
- ROBOTICS – Institut für Robotik und Flexible Produktion
- COREMED – Zentrum für Regenerative Medizin und Präzisionsmedizin
- HEALTH – Institut für Biomedizinische Forschung und Technologien
- LIFE – Institut für Klima, Energiesysteme und Gesellschaft
- POLICIES – Institut für Wirtschafts-, Sozial und Innovationsforschung
- Geschäftsfelder
- Produkte & Services
- Forschungsinfrastruktur
- Beteiligungen
- Karriere
- Aktuelles
- Publikationen
- Kontakt zu uns
euRoboGym
LAUFZEIT:
05/2024
—
04/2025
Projektlaufzeit gesamt:
1 Jahr
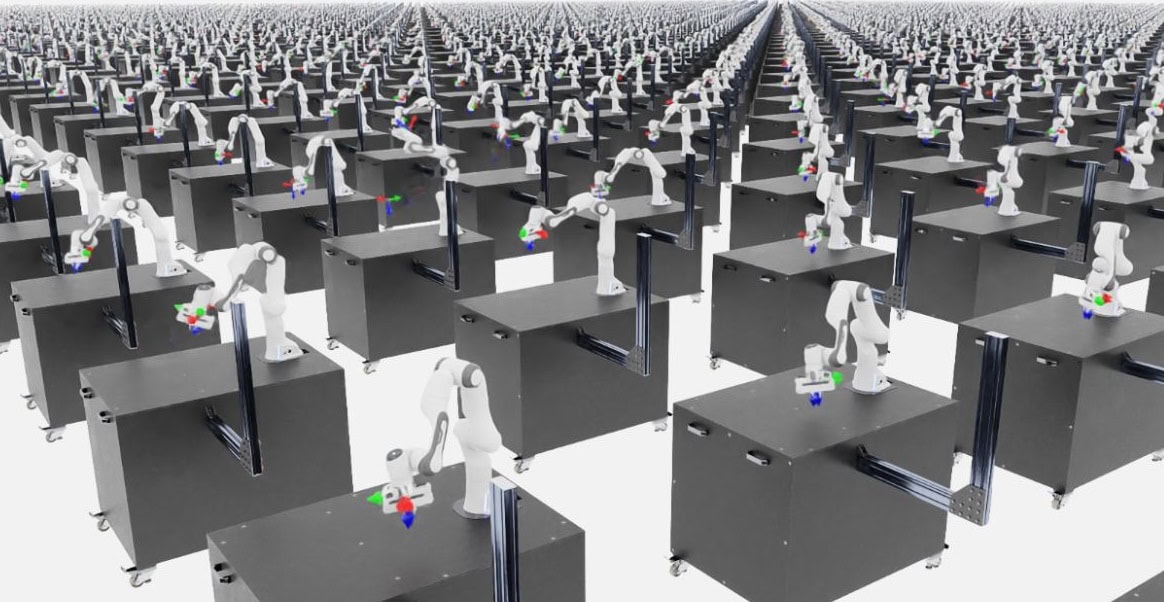
Parallel laufende Roboter, Foto: JOANNEUM RESEARCH/Reiterer
Das Projekt
Einen Roboter neue Aufgaben lösen zu lassen, ohne Änderungen an der Programmierung vorzunehmen – das können Algorithmen aus der Familie des Reinforcement Learning bewerkstelligen. Wie komplex die Aufgabe sein kann, hängt stark von der vorangehenden Trainingsphase ab. Mit geeigneten Ansätzen, um Lektionen aus einer Vielzahl paralleler Simulationen in die richtige Welt zu übertragen, machen wir diese Algorithmen für industrie- und alltagsrelevante Roboterprobleme nutzbar.

Forschungsgruppen
Downloads
Auftraggeber
EuROBIN
Projektpartner
Details zum Projekt
Deep Reinforcement Learning (DRL) ist eine vielversprechende Technik zur Lösung komplexer Aufgaben für Roboter. Die parallele Simulation von Roboterumgebungen ist der Schlüssel, um den erforderlichen Lernprozess erschwinglich, kosteneffizient und sicher zu gestalten. In einem vorhergegangenen Projekt haben wir robo-gym entwickelt, ein Open-Source-Toolkit, das DRL für Robotersteuerungsstrategien mit verteilten Simulationen kombiniert. Wir haben die Eignung unseres Toolkits für Zielerreichungs- und Hindernisvermeidungsaufgaben für mobile Roboter sowie Manipulatoren gezeigt. Durch gemeinsame Schnittstellen werden in Simulation trainierte Strategien am richtigen Roboter verfeinert und zur Anwendung gebracht. Für das euRoboGym-Projekt werden wir unser Toolkit unter Einbeziehung aktueller Entwicklungen um die Möglichkeit erweitern, auf einfache Weise Trainings- und Ausführungsumgebungen für neue digitale Zwillinge umzusetzen. Darüber hinaus werden wir das Angebot an unterstützten Simulationswerkzeugen und -bausteinen ausbauen und Komponenten für weitere benötigte Roboter hinzufügen.
Fördergeber
Projektbeteiligte

Ähnliche Projekte
Miteinander zukunftsrelevant
Die JOANNEUM RESEARCH ist Innovations- und Technologieanbieter im Bereich der angewandten Forschung. Als Forschungsgesellschaft der Länder und Regionen prägen wir mit unseren Forschungskompetenzen die Entwicklung unserer modernen Gesellschaft und Wirtschaft nachhaltig und menschenzentriert. Als multidisziplinäres Team in flexiblen, innovationsfreundlichen Strukturen leben wir höchste gesellschaftliche und wissenschaftliche Ansprüche.