- About us
- Research expertise
- DIGITAL – Institut für Digitale Technologien
- MATERIALS – Institut für Sensorik, Photonik und Fertigungstechnologien
- ROBOTICS – Institut für Robotik und Flexible Produktion
- COREMED – Zentrum für Regenerative Medizin und Präzisionsmedizin
- HEALTH – Institut für Biomedizinische Forschung und Technologien
- LIFE – Institut für Klima, Energiesysteme und Gesellschaft
- POLICIES – Institut für Wirtschafts-, Sozial und Innovationsforschung
- Business areas
- Products & services
- Research infrastructure
- Beteiligungen
- Career
- Aktuelles
- Publications
- Kontakt zu uns
euRoboGym
Duration:
05/2024
—
04/2025
Total Time:
1 Year
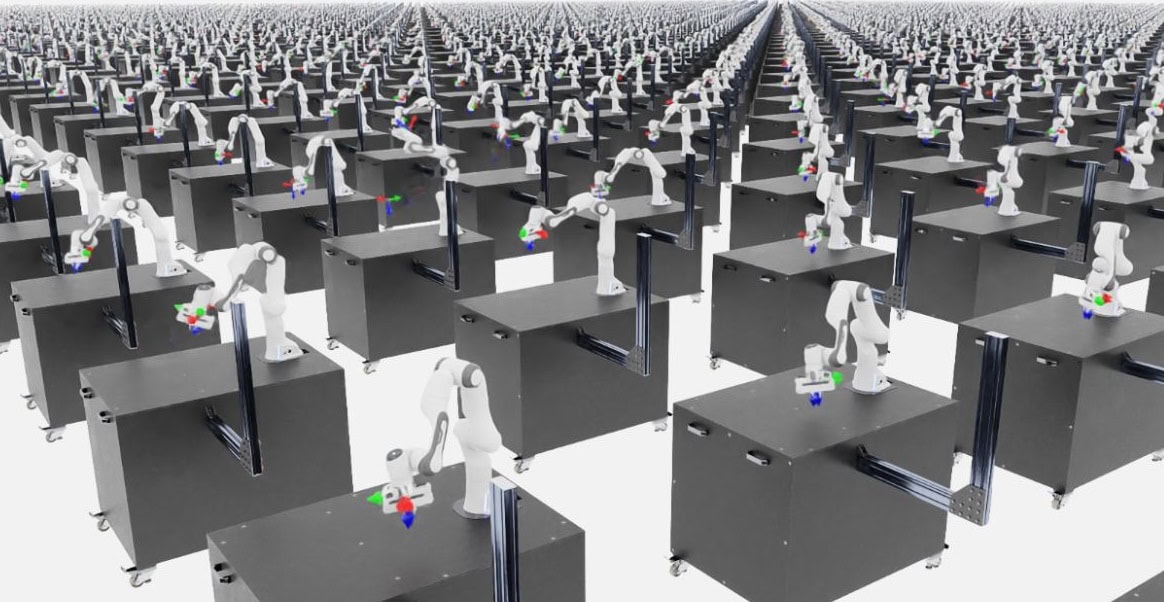
Robots running in parallel, Photo: JOANNEUM RESEARCH/Reiterer
The Project
Letting a robot solve new tasks without making changes to the programming - this can be achieved by algorithms from the reinforcement learning family. How complex the task can be depends heavily on the preceding training phase. Using suitable approaches to transfer lessons from a large number of parallel simulations into the real world, we make these algorithms usable for robot problems relevant to industry and everyday life.

Research groups
Downloads
Sponsors
EuROBIN
Project Partners
Project Details
Deep reinforcement learning (DRL) is a promising technique for solving complex tasks for robots. Parallel simulation of robot environments is key to making the required learning process affordable, cost-efficient and safe. In a previous project, we developed robo-gym, an open-source toolkit that combines DRL for robot control strategies with distributed simulations. We have demonstrated the suitability of our toolkit for target reaching and obstacle avoidance tasks for mobile robots as well as manipulators. Using common interfaces, strategies trained in simulation are refined and applied to the right robot. For the euRoboGym project, we will expand our toolkit to include the possibility of easily realising training and execution environments for new digital twins, taking current developments into account. In addition, we will expand the range of supported simulation tools and modules and add components for other required robots.
Sponsor
Project Participants

Similar Projects
SHAPING THE FUTURE
TOGETHER
JOANNEUM RESEARCH provides innovation and technology services in the field of applied research. As a research company working on behalf of various federal provinces and regions in Austria, our expertise shapes the development of our modern society and economy – sustainably, and always with a focus on people. As a multidisciplinary team working in a flexible set-up that fosters innovation, we always live up to the highest social and scientific standards.
CONTACT
JOANNEUM RESEARCH FORSCHUNGSGESELLSCHAFT MBH
TOGETHER | Alle Rechte vorbehalten. Created by idlab media GmbH & Lorem Ipsum web.solutions GmbH